Projects
Four Arms
- Description: This project is used to plan trajectory using RRT, RRT Connect, RRT Star, PRM, CHOMP, STOMP, etc. Algorithms for manipulation motion.
- Technologies Used: Rust, Ndarray, Rerun, URDF
- Github: View on Github
RoboBivouac
- Description: This project enables the robots to communicate using decentralized network, using BATMAN-adhoc.
- Technologies Used: BATMAN, Adhoc, Decentralized Network, Node
- GitHub: View on GitHub
Physical AI using ROS2
- Description: This project focuses on integrating physical AI capabilities into robots using ROS2, enabling them to perform complex tasks autonomously by leveraging advanced AI algorithms and sensor data.
- Technologies Used: ROS2, Python PyTorch, SO101, LeRobot, SmolVLA, ACT
- GitHub: View on GitHub
Isaac Denso
- Description: Isaac Lab project for Denso arm robot.
- Technologies Used: Isaac Lab, Denso Arm, ROS2, Python
- GitHub: View on GitHub
MANTIS
- Description: Mutli-Arm Networked Teleoperation Interface System for teleoperating Bimanual robots.
- Technologies Used: ROS2, Godot, Websocket, LeRobot, SO 101
- GitHub: View on GitHub
Mmwave TI ROS
- Description: This project is about using
ti mmwave sensorwith ROS2. It converts the radar pointcloud to laserscan so that it can be used for obstacle avoidance and autonomous navigation. - Technologies Used: ROS2, Ti Mmwave Sensor, PCL, Radar, CUDA, OpenMP
- GitHub: View on GitHub
Behaviortree ROS2 Pick Place
- Description: This project is about using Behaviortree Cpp with ROS2 to perform the actions to Pick the small cube and then place it.
- Technologies: C++, Behaviortree Cpp, ROS2, Moveit2, Cobotta Arm
- GitHub: View on GitHub
Dynamic orchestration of multi-robot systems in real-world logistics environments
- Description: Built for the edge-cloud-robot continuum, it offloads compute-heavy tasks like SLAM and semantic segmentation on the fly - based on live battery levels, network quality, and system load.
- Technologies Used: Python, ROS2, CuVSLAM, People Segmentation, 5G, Nav2, Behaviortree, Docker, Kubernetes, Multi Robots
- LinkedIn Post: View on LinkedIn
Imitation learning
- Description: This project is about using Imitation Learning to train the ACT polity for SO101 robot arm to pick the toothbrush from the table amoung other objects.
- Technologies: Python, LeRobot, Huggingface, SO101
- GitHub: View on GitHub
Edge RTC
- Description: This project aims to integrate WebRTC capabilities into ROS2 applications, enabling real-time communication and data exchange. Specifically for video streaming and low latency application with Robotic Perception SOTA models.
- Technologies Used: Python, ROS2, WebRTC, aiortc, cv_bridge
- GitHub View on GitHub
MPC Mobile Robot
- Description: Implemented MPC for mobile robot to reach the target goal, using numpy, scipy, rerun-sdk for python and nalgebra, rerun for rust.
- Technologies Used: Rust, Python
- GitHub: View on GitHub
Bandu: AI Agents for ROS2
- Description: Bandu is an open-source project that aims to create AI agents for ROS2, enabling robots to perform complex tasks autonomously using LLMs, and VLMs.
- Technologies Used: ROS2, LLM, VLM, GPT-4, Whisper, Ollama, RAI
- Website: View on Website
ROS2 K3S
- Description: This project involves the deployment of a lightweight Kubernetes cluster using K3S on a set of Raspberry Pi devices running ROS2, enabling the orchestration and management of containerized ROS2 applications in a distributed environment.
- Technologies Used: K3S, Kubernetes, ROS2, Raspberry Pi, Docker
- GitHub: View on GitHub
PyCuVSLAM ROS2
- Description: This project is a ROS2 package that provides a ROS2 interface for the PyCuVSLAM library, enabling users to perform visual SLAM using CUDA-accelerated algorithms in Python with ROS2.
- Technologies Used: ROS2, PyCuVSLAM, Docker, VSLAM
- GitHub: View on GitHub
- Website: View on Website
NavSwarm MARL
- Description: This project involves the development of a multi-agent reinforcement learning (MARL) algorithm for swarm robotics, enabling multiple robots to work together to achieve a common goal in the context of autonomous navigation with obstacle avoidance.
- Technologies Used: ROS2, PyTorch, Gazebo, Zenoh, Stable Baselines3
- GitHub: View on GitHub
Coffee Robot: Personalize robot to deliver the coffee
- Description: This project involves the development of a personal robot like turtlebot3 which is integrated with various sensors like LiDAR, IMU, camera, and wheel encoders for localization, mapping, navigation with path planning, and obstacle avoidance.
- Technologies Used: ROS2, Nav2, LiDAR, IMU, MicroROS, Edge
- GitHub: View on GitHub

Nav2GPT: Let’s Talk with Robots
- Description: This project combines the power of LLM with Nav2 API to control the robot by just talking to the robot, which is how we suppose to talk with the robots.
- Technologies Used: Ollama, Llama3, ROS2, Nav2, Whisper
- GitHub: View on GitHub
Multi-robot Visual SLAM & Navigation
- Description: This project involves the development of a multi-robot visual SLAM and navigation system that enables multiple robots to work together to build a map of an unknown environment and navigate through it using VSLAM and avoid dynamic obstacle with Nav2 using NvBlox costmap layer.
- Technologies Used: ROS2, CuVSLAM, NvBlox, Nav2, Isaac Sim, Docker, Zenoh
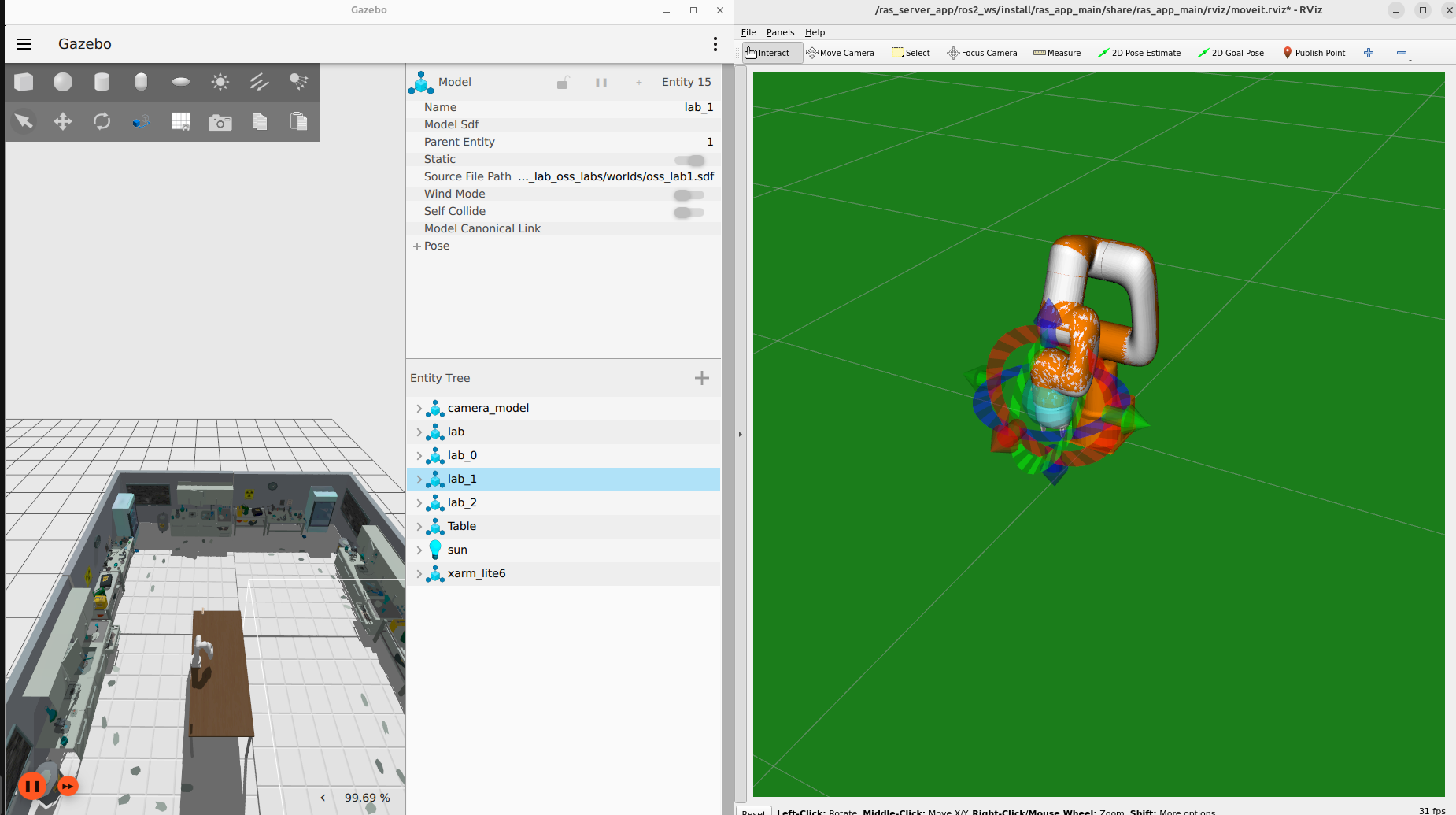
Robot Application Stack
- Description: This project is a robotics application stack that allows robotics applications to be written once and run anywhere. It enables real-time feedback between virtual and physical workspaces, and ensures robots can seamlessly operate in dynamic environments.
- Technologies Used: ROS2, Gazebo Sim, MoveIt, MQTT
- GitHub View on GitHub
Sensor fusion for autonomous vehicles
- Description: This project involves the development of a sensor fusion algorithm that combines data from multiple sensors (LiDAR, cameras, and radar) to improve the accuracy and reliability of object detection and tracking in autonomous vehicles.
- Technologies Used: Kalman Filter, Carla, ROS2
- GitHub: View on GitHub
IO Gripper Controller
- Description: This project involves the development of a gripper controller which is based on IO that allows for precise control of a robotic gripper using ROS2 Control. The controller is designed to work with various types of grippers which can be configured using params
yamlfile and can be easily integrated into existing robotic systems. - Technologies Used: ROS2, ROS2 Controller, ROS2 Control
- GitHub: View on GitHub